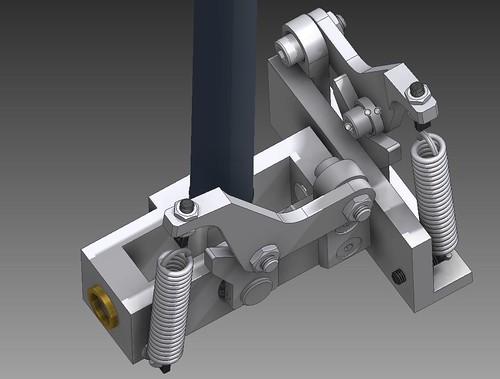
I would like to show the gimbal layout I am currently working on. I use the principle of the real aircrafts "feel and centering unit". Ball bearings are rolling on CAM plates (one for each axis) as the stick is moved. The CAMs forcing the bearing holder arms up and down. These arms lifting the extension springs.
The good thing is, that with different profiled CAMs I can produce different stick characteristics.
I will also use rotational fluid dampers (one for each axis) which will damp the movement of the stick to get a nice smooth realistic feeling.
Wow, very impressive. Are you planning it as a deskmount, or a full-sized floor mounted stick? You've probably got some alternate cam designs already, but I would suggest one with an arc, rather than a V to reduce/eliminate the center detent feel. IJ and his NXT has spoiled me and probably many others in that regard. Looking forward to seeing a prototype.
thx for your input. The gimbal is designed for a full scale control column. As you said, the round CAM shape is very important. The CAM is not V but more like an "U" to eleminate the center detent. The radius at the bottom is quite critical. If it is too big, then the movement can be very floppy around the center. The good thing is that it is easy to make different CAM shapes for experimenting. I don`t know if this design will ever get into manufacturing, at the moment it is more like an experiment. will see..
Baur`s work is truly amazing. He uses the sheet metal very creatively for sure. As I can see his CAM shape is similar to mine, and that is a good sign for me:) I will finish up the design keeping in mind the goal of simple and cheap machining. I still have a long way to go. I have done any calculations neither on the resulting stick forces or on construction strength. I will do this, then I can optimize the design. After all I will ask for some quotations and then I will see the price of dreaming... CNC is never cheap when you make one single piece.
Let me know when you get ready to get some prices. I know several different CNC machine companies around my area of the world that I used to deal with that would love to be able to at least quote the project.
Star Citizen Referal Code STAR-MP6J-VFH7
i7-13700K @ 3.40GHz 32GB RAM GeForce 3060RTX MSI MAG Z790 Tomahawk lots of SSD's and a good old fashioned 1TB HDD Samsung G9 Odyssey 49" TrackIR 5 with Track Clip Pro Windows 11 64bit Warthog #1397...compliments of SimHQ
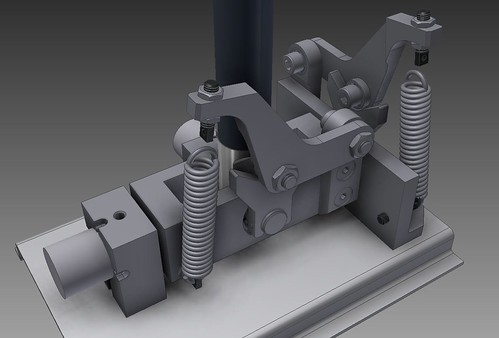
Currently I am fine tuning the CAM, to have a linear spring extension. Also I am compressing the design to have a more compact size. I am close to the goal, but some more detailed stick force calculation and strength calculation is required.
I have done some more calculation. Due to the long stick, de gear ratio is quite big. It is ca. 1:18 It means that with the usage of 630N springs, the resulting max. stick force will be 35N what is equal to ca 3,5kg. It sounds like a comfortable stick force, however I could live with a bit more, especially on the elevator side. I will have a look on this.
On the strength side I have a lot of reserve, so I can have stronger springs and I can change a few part to aluminium instead of steel.
I tried the stick force on my current cougar setup. It is around 2,4kg and I found it pretty strong in a long dogfight. Therefore I can live with the 3,5 kg. So I am finishing the design and begin the super boring drafting.
In the meanwhile I wanna show some cool stuff I bought for this project on E-bay. These are high quality industrial rotary viscous dampers. They are damping the rotational movements with the help of silicone oil. They provide +/- 40deg super smooth and !adjustable! damping for both axis. The street price of these gems is 580 USD/piece, so it was a bargain for 20USD each considering that they are brand new. I quickly bought 8 pieces:)
Yep, I think your guess can be quite accurate. I hope the small, family style CNC workshop I have contact with will quote good prices.
The pedal design is coming now. I have some ideas. It is just bloody hard to stand up from the CAD program at work and sit down with the same thing at home:)
Me too. I rather launch a game, than fire up ProE Wildfire or AutoCAD. Although it does make it easier if you have inspiration and want to make something happen. What's your tool of trade?
I have never used ProE, but I haven`t heard about too many happy users either:)
Anyway, I think I found my CNC guy. He turned out to be a flyer as well, we used to fly from the same small airfield, and he is building his own autogiro now. So he is more than happy to help me:) He also offered some cool, aerospace grade 7075 Alu.
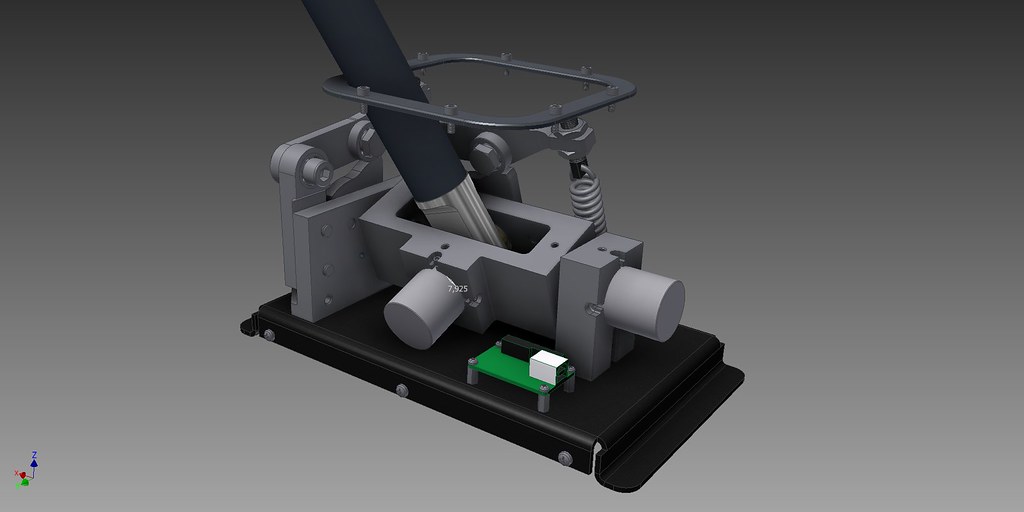
This design is also ready for machining, but before that I had to make some adjustments. I decided to turn the whole gimbal system up side down. So the center of the gimbal can be as close as possible to the mounting plate, while I can use longer springs, and higher mechanism. It is important to keep the center close to the plate, otherwise I can end up with a huuuuge opening on it:) I installed longer springs, so I can have some more pretension on them. Just like on the pedals I decided to use a simple steel mounting plate. The opening will be covered with leather boot.